
AI-Driven or AI-Assisted: Deployment of AI in construction
Innovation



Construction management processes are highly dependent on job site data. Accurate and timely data collection is necessary to support evaluation and management of projects’ status for progress reporting, quality control, productivity analysis, safety management, etc. In a dynamic environment such as a construction job site, monitoring the changes and controlling the status require continuous collection of huge amounts of data. Meanwhile, construction site data need to be collected using various sources of sensory data to provide enough insights into the current condition of the job site. Data acquisition methods like laser scanners or 360-degree images may be used alone or together based on the granularity of data and project progress level. For example, in some construction job sites, there might be so many obstructions that capturing data such as 3D point clouds would be less effective. In that case, complementary data acquisition methods should be employed to provide complete status information of the construction job site. However, using several technologies at the same time may lead to new challenges regarding data fusion and integration.
Current practice for acquiring, recording, and managing construction job site data is mostly manual which is labor-intensive and costly. Collecting information using several types of remote sensing technologies like laser scanners, 360 cameras, GPS, and tag readers may require a complete crew of surveyors who commute between offices and job sites on a routine basis. Also, working condition and judgment of the human operators at the time of data capture may affect the completeness and reliability of the collected data. The diversity and accuracy of captured data play a key role in the efficiency of its post analysis. Also, manual data collection in hazardous environments increases health and safety risks. Moreover, the collected data may include repetitive information from parts of the job site where there is no visible progress. As result, a huge amount of useless data would be collected and stored, which would make it difficult to search and process. In this article, we introduce an innovative application to be used for automated data acquisition in construction job sites.
POMiCapture
In recent years, automated data collection using various technologies such as drones and robots has been adapted in the construction industry. Boston Dynamics’ Spot is now employed to help the construction job site personnel in performing tiresome and unfavorable tasks. In Pomerleau’s job sites, Spot is used to capture data for site progress monitoring, BIM model comparison and quality control, and digital twin generation. Spot can be programmed to conduct a routine site walk for the collection of 360 images or point clouds at the same locations required for comparison over time. This helps surveyors to assure the data is consistently captured at the same locations and facilitates the data collection setup.
Daily data collection in large construction projects brings up another challenge which is the volume of the recorded data. Construction environments are inherently dynamic, but the operations’ progress is not always tangible on a daily or even weekly basis. Thereby, acquired data will include repetitive records which do not offer useful insights for the analysis. Storing and searching through such a big pile of data would be too expensive and inefficient to be practical, and at some point, the operators must overwrite the collected data. In that case, the track of historical data would be lost for future references. One solution can be to establish a data gathering plan based on the project's progress. Nevertheless, project progress can be delayed because of numerous reasons and the baseline schedules need to be updated regularly. So, synchronizing data gathering plans and project schedules regarding those updates raises new issues.
To overcome the mentioned challenges, several models have been integrated into an innovative application named POMiCapture. Figure 1 illustrates the steps of the proposed solution. In the first step, a predefined circulation map is uploaded to Spot. The circulation map generation is an inbuilt feature that benefits from different technologies and tools like LiDAR and cameras to train Spot with various elements of the job site. Therefore, Spot is aware of the existing condition on job sites and is able to navigate and collect data efficiently. Robots possess limited situational intelligence to do specific complex tasks requiring an object-aware perception of their environment. So, in the proposed solution, AI algorithms such as computer vision models are integrated with Spot to make it more intelligent to collect data while navigating the job site.
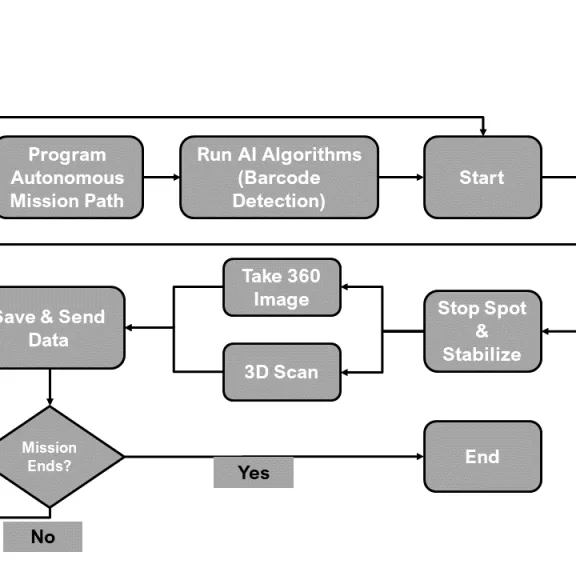
Figure 1- Workflow of the proposed solution
Computer vision models backed with deep learning algorithms are employed to detect and recognize the locations for data collection while Spot is navigating the job site. These locations are marked using QR codes by the site team whenever there is progress in the construction jobs. Thereby, each time Spot detects a QR code that is installed on building elements or construction materials, it stops, changes its status to the stabilization mode, and starts acquiring various types of data such as 360 images, RGB-D images, and point clouds. Stabilization mode is another useful feature of Spot to reduce the amount of noise in the collected data and enhance its quality. Moreover, the information of QR codes is extracted and saved in spreadsheets which can be used for other applications (progress monitoring, quality control, etc.). Figure 2 shows an example of how the developed solution makes Spot capable of understanding where and how to collect data autonomously.

Figure 2 – POMiCapture smart data collection example
The Spot robot can retrieve and save the information of recognized QR codes in spreadsheets. Meanwhile, as Spot detects a QR code, different data-gathering equipment can be initialized automatically and simultaneously. The whole framework is managed to integrate and deploy on a local network connected to a local server. However, it can be set to transfer data to the cloud and to allow for remote access to the gathered data.
POMiCapture contributes to the automation of construction processes to help construction experts improve the management of building and infrastructure projects. Using autonomous robots that perceive the environment reduces the skill shortage problems and does not replace humans. This will create demand for new skillsets and improve the personnel’s efficiency. POMiCapture employs AI to facilitate data gathering in construction job sites and provide information for BIM owners to monitor project progress. Automated data gathering with POMiCapture will eliminate multiple teams taking long flights and going through hours of traffic commuting to the job site in order to collect data. At a large scale, a great number of travelling hours and road traffic emissions would be avoided. Meanwhile, BIM coordinators will have remote access to the constant flow of captured data while staying in their offices.
Moreover, POMiCapture can gather data in environments that may contain hazardous contaminations that might be damaging for humans. This will increase job site safety in addition to decreasing other safety hazards for construction workers. POMiCapture will improve the professional lives of human operators by conducting the tedious and repetitive tasks of data gathering.
What is Next…
In order to capture all necessary data to keep decision makers well informed about the construction progress, data from several sources need to be acquired and fused. Manual data acquisition in construction job sites is time consuming, labor intensive, and costly. Also, capturing repetitive data without a data gathering plan results in a huge amount of data which is mostly unusable. POMiCapture provides a solution to make data collection intelligent and efficient on construction job sites. It integrates AI algorithms with the autonomy and dynamic sensing of the agile mobile robot, Spot, to acquire data with various sensors wherever there is progress in site operations.
POMiCapture is offering many other applications to improve construction project management, increase productivity, and enhance job site safety. POMiCapture can walk daily on an outdoor job site and search for QR code-tagged equipment and locate them. Project managers can track assets to provide insight into equipment usage and productivity.
Author: Saeed Moradi
